August 2009: New results in collaboration with Javier Civera and J. M. M. Montiel on applying MonoSLAM-type methods to visual odometry will be presented at IROS 2009 in October. Essentially, this is a “forgetting filter” from which features are deleted once they pass from the field of view. The results approach those obtainable from sliding window bundle adjustment, though presumably will never be quite as accurate. What we do get from filtering is quite nice automatic management of features and track lengths, and the ability to do fully probabilistic outlier rejection.
 AVI
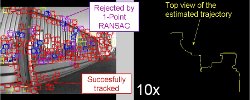
AVI1-Point RANSAC for EKF-Based Structure from Motion (PDF format),
Javier Civera, Oscar G. Grasa, Andrew J. Davison and J. M. M. Montiel, IROS 2009.

