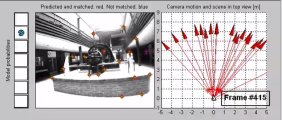
February 2008: New results to be published at ICRA 2008 demonstrating online model selection within monocular SLAM in collaboration with Javier Civera and J. M. M. Montiel (University of Zaragoza). Using an interacting multiple model (IMM) framework, we show that Bayesian model selection can be applied sequentially during real-time monocular SLAM to improve accuracy by automatically detecting periods when the camera is stationary, purely rotating or accelerating with different dynamics. This is particularly useful when tracking starts up without any known objects in the scene and avoids the underestimation of feature depths during low parallax motion.
 AVI
AVIInteracting Multiple Model Monocular SLAM (PDF format),
Javier Civera, Andrew J. Davison and J. M. M. Montiel, ICRA 2008.

